2.2 SPS1-Pultsteuerung
2.3 SPS2-Teleskopsteuerung
2.4 Tel. Motorsteuerung, HARMONICAS
2.5 SPS4-Handtaster und Fokussteuerung
2.6 SPS3-Kuppelsteuerung fester Teil
2.7 SPS5-Kuppelsteuerung beweglicher Teil
4. - Download aller Schaltpläne
5. - Verriegelungen und Sicherheit
Die Kuppel wurde im Jahre 1973 von der Firma DSD gebaut.
Um den steigenden Anforderungen der Astronomie gerechtzuwerden,
sind bis heute fast sämtliche elektronisch und elektromechanischen
Komponenten ersetzt oder erweitert worden.
Mit der letzten Modifizierung kann das Teleskop und die Kuppel,
vollkommen ferngestert werden. Für die Hardware- und Sofwarekomponenten diente zum
grossen Teil das Vorbild der 3.5m Tel.-Steuerung.
Die Steuerung der Kuppel/Teleskop geschieht mit Speicher-Programmierbaren
Steuerungen (SPS)und einem VME-Rechner (TECS). Insgesamt befinden sich fünf SPS im Einsatz.
Der VME-Rechner steuert die Geschwindigkeiten des Teleskopes und stellt das Interface zum Bedien-GUI dar.
Ausserdem beinhaltet er verschiedene Programme wie Pointingmodel, Fokuskompensation, Winkelmessung,
Zusatzgeschwindigkeiten usw...Eine genaue Beschreibung der TECS-Funktionen ist gesondert erstellt.
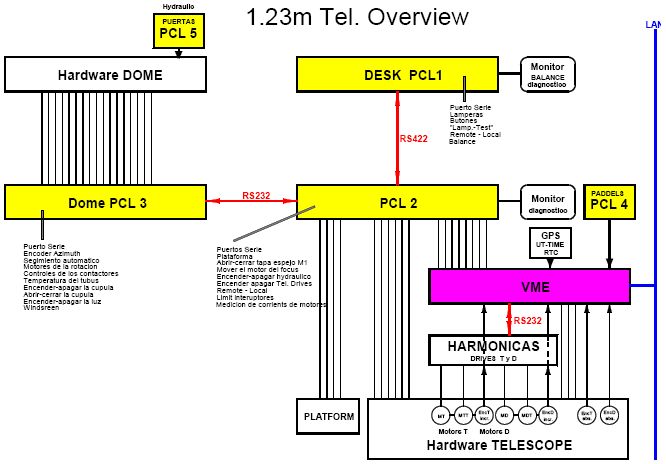
 overview
overview
hardware
Die SPS erfüllen folgende Aufgaben:
mehr

Der VME-Rechner bekommt seinen RTC (Real Time Clock, 20Hz) und die UT (Universal Time)
seriel ASCII vom GPS-Empfänger.
In das VME-Rack ist eine Karte mit Lichwellenleitern integrieert, die den RTC und die
UT weiter an die anderen Teleskope geben kann.
Ist der Schalter auf "LOCAL" gestellt, bezieht der VME die GPS-Daten vom eingebautem
System und sendet sie gleichzeitig zu den anderen Teleskopen. In der Stellung "EXTERN"
empfängt die Karte die GPS-Daten vom 3.5m Teleskop und der eingebaute GPS-Empfänger ist
ausser Funktion.
An einem VME-Ausgang liegt ein periodisches Signal, mit etwa 2HZ, das der restlichen
Hardware mitteilt, dass der TECS ordnungsgemäss funktioniert. Dieses "TECS READY"
Signal wird im TECS-GUI erzeugt. Mit einer "Watch-Dog"- Fuktion wird das Signal von
der SPS2 abgefragt. Sollte es nicht vorhanden sein, werden sicherheitsrelevante
Funktionen gesperrt.
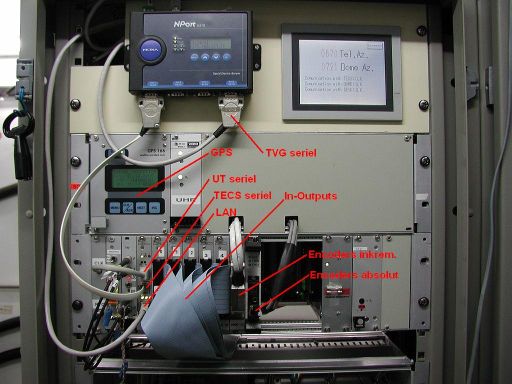
VME-Rack
GPS
IN/OUT VME
Das Bedienpult in der Kuppel ist mit einer seriellen Datenverbindung (RS422) mit der Teleskopelektronik
im Keller verbunden. Damit konnten viele Leitungen eingespart werden.
Nur Funktionen wie "Notstop" und Hebebühne sind über extra Leitungen geführt, um den
Sicherheitsaspekten gerecht zu werden.
Der Datenaustausch ist in folgender Liste ersichtlich:
Overview Dataflow

SPS1
Der serielle Datenaustausch ist hier ersichtlich:
Overview Dataflow
Die SPS sendet und empfängt komplette Strimgs, die den Status darstellen, mit maximaler Geschwindigkeit, die dem Programmcyklus der jeweiligen SPS entsprechen.
Der Kollisionschutz Teleskop / Hebebühne bezieht sich nur auf das Gegengewicht vom Teleskop. Eine Überwachung der Kollision mit der Spiegelzelle oder dem Instrument ist nicht vorgesehen. Deshalb können die Tel.-Antriebe im Remote-Betrieb nur vom TECS-GUI eingeschaltet werden, wenn die Bühne sich in der unteren RUhestellung befindet.
Der Fokusmotor kann vom TECS, vom Pult oder vom Handtaster angesteuert werden. Die Befehle werden zu der SPS4 weitergeleitet, die den Motor ansteuert.
Wird die Hydraulik vom Pult oder TECS eingeschaltet, überwacht die SPS das Erreichen des Aushebedruckes.
Sind alle Soll-Drücke erreicht, bleibt die Hydraulik eingeschaltet, mit aktiverter Ölkühlung.
Ausser den Drücken werden noch die Füllstände der Öl-Vorratsbehälter überwacht. Die Umdrehungszahl
der Pumpe für die Kugel wird von einem Frequenzumrichter geregelt.
Hydraulik
Der S1-Verschluss wird mit einer Wendeschaltung angesteuert. Dabei wird die gleiche Stromversorgung wie für den Fokusantrieb benutzt. Zwei Endschalter geben den Zustand vom Verschluss an die SPS. Zusätzlich ist eine Stromüberwachung in die Motorleitung eingefügt. übersteigt der Motorstrom einen Grenzwert, wird abgeschaltet.
Ein- und Ausschalten der Antriebe: Drei verschiedene Arten sind möglich:
1- Schalten der Antriebe vom TECS-GUI:
Die Leistungsnetzteile von T, D und Verspannung werden vom TECS eingeschaltet. Die Rückmeldung geht zum VME, der verzögert die HARMONICAS aktiviert.
Voraussetzung ist, das der TECS "READY" ist. Die Leistungsnetzteile von T, D und Verspannung werden vom Pult eingeschaltet. Die Rückmeldung geht zum VME, der verzögert die HARMONICAS aktiviert.
Beim Auswuchten werden nur die Verspannantriebe, als Konstantstromquelle, eingeschaltet. Der TECS braucht nicht "READY" zu sein. Nachdem die Leistungsnetzteile der Verspannungen aktiviert sind, Werden, verzögert, direkt die Harmonicas der Verspannantriebe aktiviert. Mit den Potentiometern am Pult kann der Verspannstrom geregelt werden.
123 drives ON/OFF
Die 4 Motorströme der Tel.-Antriebe werden über Schunt-Messwiderstände, in den Motorleitungen,
mit Messverstärkern auf +/- 10V verstärkt. Diese Spannung wird mit A/D-Wandlern der SPS
zugeführt. Im Programm der SPS wird der Stromwert auf Ampere berechnet. Ein automatischer
OFFSET-Abgleich ist möglich. Das Tuchpannal zeigt die Motorströme als Wert und als Bargraph an.
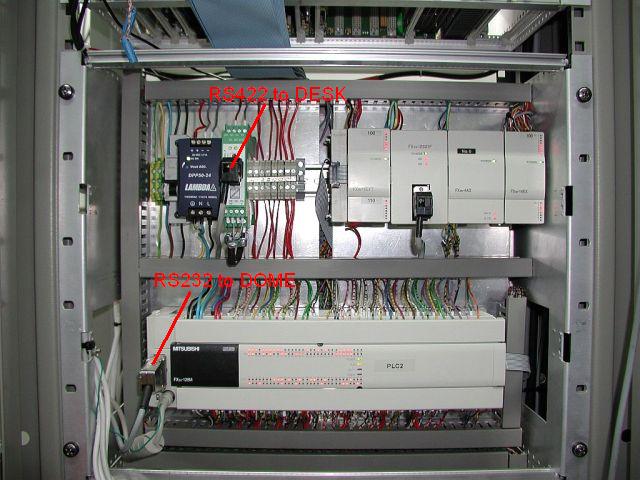
123 PCL2
Parameter vom ELMO-COMPOSER:
Achtung: Mit dem COMPOSER kann nur gearbeitet werde, wenn das Echo der Harmonica
eingeschaltet ist (EO=1)! Für den TECS muss das Echo wieder ausgeschaltet werden (EO=0) !
Parameter hier:
Programme für IN - OUTputs:
Die Verspannmotoren werden mit je einer Harmonica als Konstantstromquelle betrieben. Diese lassen sich,
unabhängig vom TECS, zum Auswuchten einschalten. Der TECS gibt keinen Strom vor. Er überwacht
lediglich seriell Störungsmeldungen der Harmonica. Der Verspannstrom wird mit analogen
Potentiometern eingestellt
Die Impulse der Inkrementalen Enkoder werden mittels EXE-Modulen von HEIDENHAIN mit Faktor 5
multipliziert (18000 x 5 = 90000 I/R) ud der HARMONICA zur Verrfügung gestellt, die intern nochmal mit 4
multipliziert und damit die Regelung durchführt. Die 90000 I/R werden durch die HARMONICA geschleift
und zum VME gefüht, der damit die Position berechnet.
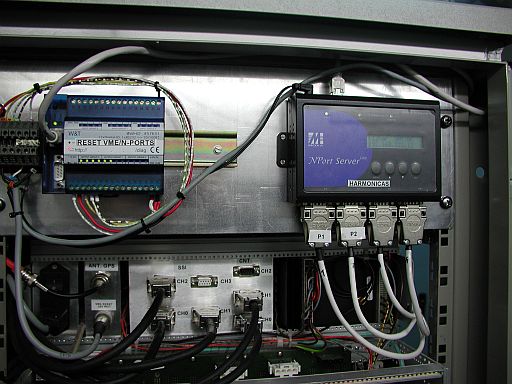
 HARMONICAS
HARMONICAS
Im Tel-Gebäude befinden sich 3 Handtaster. Mit der SPS4 werden diese gegeneinander entkoppelt.
 123 PCL4
123 PCL4
Overview Dataflow
PCL3
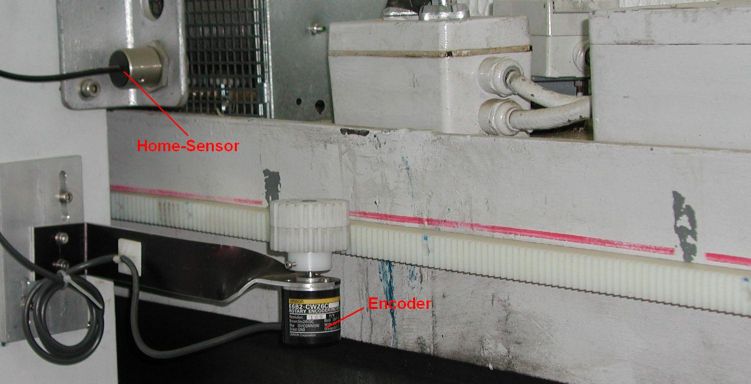
Das Kuppel-Azimut wird mit einem inkrementalem Reibradenkoder ermittelt. Neben seiner Funktion das Kuppel-Azimut zu liefern, ist er auch Indikator für den Stillstand der Kuppel. Dieser Wert ist für die Ansteuerung der Rotationsmotoren wichtig. Deshalb ist zu beachten, dass die Bewegung der Kuppel nur mit einem funktionstüchtigem Enkoder möglich ist.
Die Kuppelposition wird mit einem inkremental- Reibradenkoder gemessen.
Der Enkoder hat eine Auflösung von 100 Imp./Umdrehung. Eine ganze
Kuppelumdrehung entspricht 12600 Enkoderimpulsen.
Eine Refetrenzmarke stellet den Enkoder auf die absolute Azimutposition oº.
Im SPS-Programm kommte der 32 Bit-Hight-Speed-Zähler C251 zur Anwendung. Dieser Zähler definiert mit dem Sondermerker M8251 seine Zählrichtung.
Alle Werte sind in 1/10º angegeben.
Der Bruch 3600/12600 Ist der Kuppelazimut pro Enkoderimpuls.
Das SPS-Programm berechnet mittels der 32-Bit-Anweisungen
DMUL und DDIV das Azimut und legt das Ergebnis in D200 ab.
Beim Übergang von 0 auf 3600 oder umgekehrt, muss das Ku.-Azimut mit + oder -3600 korregiert werden, damit der Wertebereich 0 bis 2599 eingehalten wird.
Abschliessend kann das Ku.-Azimut noch mit einem Offset-Wert versehen werden, indem zum Azimut-Wert der Offset-Wert addiert wird. Anschliessend muss wieder ein Vergleich durchgeführt werden, um im Wertebereich 0 bis 2599 zu verbleiben.
Zur Zeit wird mit einer Azimutauflösung in 1/10 Grad gearbeitet.
Am Ende dieses Programmes wird eine, der Geschwindigkeit proportionale, Grösse mit Hilfe der Funktion "SPD" errechnet. Dieser Wert dient dem Programm der Kuppelrotation dazu, den Stillstand der Kuppel zu ermitteln, um das Gegenstrombremsen abzubrechen. Ohne diese Meldung vom Enkoder ist keine Kuppreldrehung möglich!
Kuppelnachführ-Automatik.
Am Anfang des Programmes werden die Parameter definiert:
Zunächst wird geprüft, ob das Tel.-Azimut, konstant war. War das der Fall, wird die Kuppelnachführung gestartet nachdem:
Es wird die Absolutabweichung, Ku.- Tel.Azimut, bestimmt. Jetzt wird überprüft, in welche Richtung (Kürzester Weg) die Kuppel drehen soll. Dafür wird der Drehbereich der Kuppel, ausgehend vom Te.-Azimut in zwei Hälften geteilt und ermittelt in welchem Halbkreissegment sich die Kuppelposition befindet. Bei Tel.-Azimut kleiner als 180º ist das graphisch veranschaulicht:
Bei Tel.-Azimut grösser als 180º:
Im Nordbereich (135º bis 225º) und im Südbereich (45º bis 315º, über 0º) wird bei Nachführgeschwindigkeiten mit einem Vorhalt gearbeitet, der hier selbsterklärend veranschaulicht ist:
Kuppelrotation
Die Ausgänge der SPS1 für schnelles und langsamen Drehen sind, über Hilfsschütze, direkt mit den entsprechenden Leistungsschützen verbunden.
Zentrale Einheit des Programmes ist ein Zähler, der beim Beschleunigen auf- und beim Bremsen abzählt. Entsprechen dem Zählerinnhalt werden die Motoren geschaltet.
Anfahren:
Die Rotorwiderstände werden in drei Stufen überbrückt, bis das grösste Drehmoment anliegt und die Kuppel mit maximaler Geschwindigkeit dreht..
Bremsen:
Als Indikator für den Kuppelstillstand wird die Geschwindigkeitsermittlung des
Azimutenkoders benutzt. Steht die Kuppel beim letzten Bremszyklus (volles
Gegenstrombremsen) still, werden die Motoren abgeschaltet.
Es ist zu beachten, dass die Rotaion nur mit dem Enkoder funktioniert. Sollte
der Enkoder ausser Funktion sein, wird beim Starten die Rotation abgeschaltet
und eine Fehlermeldung ausgegeben, die quittiert werden muss.
Ein Überblick der Funktion geben folgende Diagramme:
Ein- und Ausschalten der Kuppel.
Die SPS3 mit den Hauptfunktionen im Keller wird mit USV
(Unterbrechungsfreie Strom-Versorgung)-Spannung 220V
versorgt.
Ein Spannungswächter meldet der SPS einen Spannungsausfall vom
öffentlichem Netz, die dann zwei Fälle unterscheidet:
Kurzzeitiger Netzausfall
Weil bei einem kurzem Netzausfall zwangsweise das Kuppel-
hauptschütz abfällt, wird es bei Spannungswiederkehr
automatisch sofort wieder eingeschaltet, wenn es vor dem
Netzausfall eingeschaltet war. Dabei ist es gleich ob das
Hauptschütz vom Pult oder über die serielle Schnittstelle
eingeschaltet wurde.
Länger anhaltender Netzausfall
Dauert der Netzausfall länger als 10 Minuten, wird bei
Spannungswiederkehr das Kuppelhauptschütz nicht wieder-
eingeschaltet und die Pufferung aufgehoben. Dann werden
laufende Programme, wie die automatische Kuppelnachführung,
abgebrochen (Entsprechend Not-Stop) und die Kuppel muss, bei
Spannungswiederkehr, manuell eingeschaltet
werden.
Eine weitere SPS5 befindet sich im beweglichem Teil der Kuppel, die die Hydraulik vom Spaltverschluss steuert und Fehlermeldungen anzeigt.
Öffnen und Schliessen der Kuppel
Die Elektrik für die Spalt-Hydraulik wurde im beweglichem Teil der DSD-Steuerung komplett mit einer speicherprogrammierbaren Steuerung (SPS) ersetzt. Ist der Spalt geöffnet, zeigt die Anzeige im Schaltschrank „A“. Ist er geschlossen „-“.
Die Hydraulik wird von der SPS folgendermaßen gesteuert:
Tor öffnen:
Tore schließen: Entsprechend dem Ablauf für Öffnen:
FUNKTIONSPRINZIP DES SPS-PROGRAMMES
Herzstück des Programmes ist der Auf-Zähler Co. Er startet, wenn zu- oder
aufgefahren wird.
Der Ablauf des Zyklus kann jederzeit unterbrochen werden, indem die Taste der Gegenrichtung betätigt wird.
Störungen:
Sollten keine, oder nur einer der Endschalter erreicht werden, wird am Ausgang
der SPS eine Störungsmeldung ausgegeben. Diese Störungsmeldung blockiert die
Funktion nicht und es kann der Spaltverschluss ohne Quittieren aktiviert werden.
Im Störungsfall ist die Steuerung blockiert und die entsprechende Fehlermeldung erscheint an der 7-Segmentanzeige:
Fehlerkode der Spalthyraulik:
Tubus-Temperaturmessung
Zur Temperaturmessung ist ein Temperatursensor vom Typ PT100 an einer
Strebe angebracht. Nach dem Dreileiter-System ist er mit dem Messmodul
der SPS1 verbunden.
Im Programm der SPS wird die Temperatur über etwa 10 sec gemittelt.
Sie kann mit einem Korrekturwert versehen werden. Von der Software wird
die Identifizierungsnummer des Modules überprüft. Ebenfalls wird kontrolliert
ob die aktuelle Temperatur im Bereich von -30 bis +50 Cº liegt. Sollte die
Identifizierungsnummer oder der Temperaturbereich nicht übereinstimmen,
wird konstant 99.9Cº als Fehlerwert ausgegeben.
Die Tubustemperatur kann an der Schnittstelle RS232 abgefragt werden und sie
wird an einer nummerischen Anzeige dargestellt.
Windschirm, SPS5
Die Elektrik für den Windschirm wurde im beweglichem Teil der DSD-Steuerung mit einer speicherprogrammierbaren Steuerung (SPS) ersetzt. Dabei werden die Ansteuerfunktionen im Wesentlichen durch die SPS durchgeschleift, ohne sie zu beeinflussen. Die Verwendung einer SPS bringt hier nur den Vorteil, dass Fehler auf der 7-Segmentanzeige sichtbar werden und sie somit schneller beseitigt werden können.
Kurzbeschreibung der Windschirmsteuerung:
Der Motor m2 am Rouleaukasten behält beim Hoch- oder Runterfahren seine
Drehrichtung bei, wirkt jedoch im ersten Fall bremsend (verspannend)
und im zweiten antreibend.
der Motor m1 an den Zugbändern ändert seine Richtung entsprechend und wirkt beim Hochfahren antreibend und beim abfahren bremsend.
Es stehen 2 Betriebsarten zur Verfügung:
Auffahren:
Der Motor m2 (Federmotor) am Rouleau dreht in Richtung abwickeln während der
Motor m1 (Elektromat) das Zugband aufwickelt. Damit wirkt er antreibend und
der Motor m2 am Rouleau wirkt mit kleinem Moment bremsend. Dies geschieht
bis am Elektromaten der Endschalter b3 für AUF anspricht, ehe der
Koppelmechanismus zum anderen Teil des Windschirmes erreicht ist. Der
K-Endschalter b4 spricht noch nicht an.
Abfahren:
Der Motor m2 (Federmotor) am Rouleau wickelt das Rouleau mit großem Drehmoment
auf und der Motor m1 (Elektromat) wickelt das Zugband ab. Jetzt wirkt der Motor
m2 am Rouleau antreibend und der Motor m1 am Zugband bremsend. Der Windschirm
fährt ab, bis der Endschalter am Elektromat b5 für AB anspricht. Die Einstellung
des Endschalters legt das untere Niveau der Windschirmkannte fest. Der Endschalter
b6, der vom Schirm betätigt werden kann, ist als Sicherheit gedacht (K-Schalter).
Zu B.:
Die zweite Windschirmhälfte kann an den Windschirm gekoppelt werden. Dazu muss
der Schirm ganz aufgefahren werden und der Schlüsselschalter b7 (“Überbrückung
Einkoppeln Windschirm“) aktiviert werden. Damit ist der Endschalter b3 am
Elektromaten unwirksam und der Schirm kann an seinen zweiten Teil kuppeln.
Jetzt ist als Endschalter nur noch b4 wirksam, dem aber mit der Überbrückung
die K-Funktion genommen ist. Nach dem Einkuppeln ist der Schlüsselschalter b7
wieder in die normale Position zu stellen, damit der Endschalter b3 am Elektromat
wieder aktiv wird und der Endschalter b4 die ihm zugeordnete Funktion als
K-Schalter wieder übernehmen kann. Danach bewegen sich beide Schirmteile
zusammen wie unter A..
Soll der zweite Schirmteil wieder abgekoppelt werden, muss der Schlüsselschalter
b7 aktiviert werden und der Schirm so weit aufgefahren werden, bis mit dem Hebel
am Ringträger die Schirme endkoppelt werden können (Die 7-Segmentanzeige zeigt“L“).
Danach wieder abfahren und den Schlüsselschalter desaktivieren.
Störungen: (Werden nicht blinkend an der Störungslampe angezeigt)
Fehlerkode:
5 : C1 Schützfehler
6 : C2 „
7 : C3 „
8 : C4 „
9 : e1 Motorschutz m1
U : U1 Motorschutz m2
: a2 Schutz Magnetverriegelung
0 : b4 K-Endschalter WI AUF
E : b6 K-Endschalter WI AB
L : b7 Überbrückung EIN
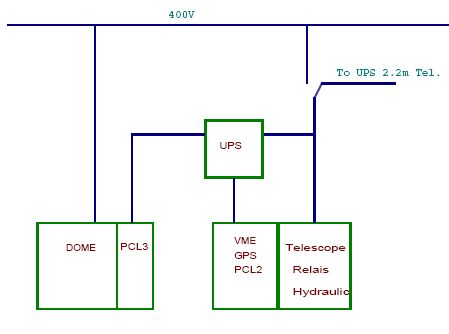
Die Stromversorgung vom Teleskop ist gesplittet. Der Beobachtungsbetrieb soll bei einer Spannungsunterbrechung weiter laufen. Deshalb sind die Hydraulik, VME, SPS2 und SPS3 mit USV-Spannung versorgt. Einen Überblick gibt:
Pläne Ansehen oder ausdrucken:
| SPS1 (DESK) |
PCL1 |
| SPS2 (TELESKOP) |
PCL2 |
| SPS3 (KUPPEL) |
PCL3 |
| HARMONICAS |
Harmonicas |
| GPS-System Calar Alto |
GPS CA |
| VME-RACK |
VME |
| Handtaster Tel.+Fokus |
Handtaster |
Hydraulik Teleskop |
Hydraulik Tel. |
| Hydraulik Spalt und Windschirm |
Hydraulik Spalt, Wind |
Hardware-Verrigelungen |
Verriegelungen |
Übersichten ansehen oder ausdrucken:
| Datenfluss zwischen PCL1-PCL2-PCL3
|
Datas |
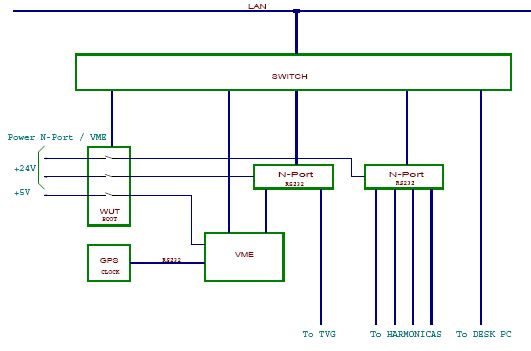
| Hardwareverbindungen
|
Hardware |
| Overview Teleskop
|
Overview |
| Bitliste VME
|
Bitliste |
| Stromversorgung | Stromversorgung |
HARMONICA-Parameter vom ELMO-COMPOSER:
HARMONICA-Programme für IN - OUTputs:
5. Verriegelungen und Sicherheit
Verriegelungen
Software:
Bei der seriellen Datenkommunikation wird bei jedem String überprüft, ob sich CR an der richtigen
Stringposition befindet; erst dann wird der Befehl freigegeben. Sicherheitsrelevante
Befehle müssen mindestens 3 Mal empfangen werden, ehe der Befehl aktiviert wird.
Die HARMONICAS haben eine ganze Reihe von Limit-Parametern. Bei deren Überschreitung wird
der Bewegungsvorgang abgebrochen.